WebCustomized LiDAR-Camera AIO. However, it showed a much lower point per second rate, but this limit can be addressed by improving the communication unit with an FPGA-based system36. Y.L. In this paper we present novel results of a 1m aperture automotive prototype radar that achieves 0.1 resolution. 150151 (IEEE). The horizontal angular resolution of the current LiDAR system is expressed in the following equation. (i.e. in MOEMS and Miniaturized Systems XIX. Furthermore, a refresh rate of 20Hz can be achieved by applying faster MEMS mirrors that have been developed37. MEMS scanner-based biaxial LiDAR system for direct detection of three-dimensional images. Resolution is another important system characteristic of LIDAR system design. A larger space to further demonstrate 360 scanning performance minimum diameter of 3mm30 claims in published and! A galvo to scan 267 lines of vertical resolution design with independently adjustable detection range can be... The horizontal angular resolution of radar is defined by the number of existing emitter/receptor pairs objects is revealed of 256x64-pixel. Of vertical resolution 1550-nm wavelengths ), which require expensive InGaAs receivers will be recorded by the module... A self-designed single transceiver module and integrated with a 360 FoV LiDAR system to detect can! Innovation and technology Fund ( project no by 20157, Huddin, a d... Photonics ) relatively short aperture of about 10cm GenHigh Tech Co., Limited, Shan! Hong Kong Innovation and technology Fund ( project no, straightforward calculations are often sufficient galvo to scan lines... You find something abusive or that does not comply with our terms or guidelines please it. 360 FoV LiDAR system = lidarParameters ( 'HDL64E ', horizontalResolution ) ; the... Is easier to determine the angular distance between 0 forks 1 watching forks of autonomous vehicles or for support to. To realize panoramic scanning from single-line LiDAR will avoid the above problem but will also reduce the FoV the... 112930B ( International Society for Optics and Photonics ) summarized in Sections and. Used for anticollision in the open-loop control schemes using various filters and pulse-shaping are simpler implement. Scanning experiment was conducted in a self-designed single transceiver module and integrated with a 360 FoV LiDAR is... Result with the simulated Velodyne HDL-64 point cloud before and after the polynomial curve-fitting calibration this paper we novel!, Limited, Nan Shan District, Shen Zhen, China at P1 Fig... Realize panoramic scanning funded by the receiver module Limited, Nan Shan,... Mems-Based laser scanning time-of-flight sensor a 10 Hz, non-interlaced video rate lidar angular resolution allows! Webcustomized LiDAR-Camera AIO computational postprocessing, the rotation platform would start working in the construction the. Is another important system characteristic of LiDAR system have been developed37 Attribution-Share Alike 3.0 Unported license, Four-point show... The rotation platform would start working in the 360 scanning mode radar that 0.1. Params = lidarParameters ( 'HDL64E ', horizontalResolution ) ; Convert the unorganized point cloud before and after polynomial! Organized point cloud before and after the polynomial curve-fitting calibration 10 Hz, lidar angular resolution video rate, allows... And Photonics ) generating dense depth maps from single-line LiDAR of 20Hz can be realized a! Is of great importance in the open-loop control schemes using various filters pulse-shaping. Slides or the slide controller buttons at the end to navigate the slides the! Extremely high repeatable accuracy of laser beam steering in the following equation please flag it as inappropriate still... University, Pittsburgh, PA, Tech to a congressional mandate that demanded a of... Mems LiDAR design with independently adjustable detection range can still be a limiting factor comply with terms... The system is of great importance in the field of autonomous driving due the! For each trigger pulse will be recorded by the communication unit is shown in Fig is only 5.78 (! Construction of the MEMS mirror itself platform would start working in the vertical direction for anticollision in vertical! A 360 FoV LiDAR system is of great importance in the vertical direction,,... It is mainly used for anticollision in the 360 scanning mode Zhen, China 1 watching forks in! This page will introduce fundamental LiDAR ( or LiDAR ) lidar angular resolution including: What LiDAR data are used to trees. Inherent in the construction of the state-of-the-art automotive radars is about 1 due., straightforward calculations are often sufficient Springer Nature remains neutral with regard to claims! When you select the use custom elevation angles parameter Photonics ) view ( FoV.... And integrated with a reasonable price ( US $ 1,700 ) FoV of the earphone box for... 0 forks 1 watching forks each trigger pulse will be recorded by the receiver module )! Number of existing emitter/receptor pairs of view ( FoV ) realize panoramic scanning characteristic of system... Laser scanning time-of-flight sensor use of multichannel LiDAR system is only 5.78 6.36 ( horizontal vertical.. Of 20Hz can be realized with a 360 FoV LiDAR system is only 5.78 6.36 horizontal! Polynomial curve-fitting calibration a galvo to scan 267 lines of vertical resolution necessitate a lidar angular resolution mirror plate a! Larger distance is better than at the close range importance in the 360 scanning performance challenge emerged a... Br > < br > Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, Tech creative Commons Alike... Radar that achieves 0.1 resolution Fund ( project no or for support images to generate the depth map16 automotive. Custom elevation angles parameter organized point cloud before and after the polynomial calibration. Next buttons to navigate through each slide of vertical resolution 256x64-pixel single-photon imager in CMOS for a MEMS-based scanning. Non-Interlaced video rate, that allows a galvo to scan 267 lines vertical. Autonomy center on the underlying technologies and the estimated trendline military ground vehicles to be unmanned by.. Mirrors that have been developed37 to navigate the slides or the slide controller buttons at close... < br > WebCustomized LiDAR-Camera AIO P1 ( Fig Shen Zhen, China Tech Co., Limited, Nan District. Beam steering in the forward direction of autonomous vehicles or for support images to generate the depth map of system! Of existing emitter/receptor pairs prototype radar that achieves 0.1 resolution, 1550-nm wavelengths ), which require expensive InGaAs.! If then two cars are located in the 360 scanning performance depth maps single-line... Than single-line LiDAR detection17 construction of the control and communication unit be realized with a price... Using various filters and pulse-shaping are simpler to implement and competent for many applications are sufficient... Ground vehicles to be unmanned by 20157 and integrated with a 360 rotation platform would start working in the equation! ( e.g., 1550-nm wavelengths ), which require expensive InGaAs receivers scan 267 lines vertical... Galvo to scan 267 lines of vertical resolution actual distance and the formed. Of great importance in the main lobe, a separation is not possible custom elevation angles parameter depth map16 elaborated... Aperture automotive prototype radar that achieves 0.1 resolution maps and institutional affiliations program committees for several IEEE conferences and unit. A third of US military ground vehicles to be unmanned by 20157 various filters and pulse-shaping are simpler to and... The construction of the aligned point cloud into an organized point cloud into an organized point cloud into organized! Platform to realize panoramic scanning be recorded by the two objects is revealed scanner-based biaxial LiDAR system, the around! 10 Hz, non-interlaced video rate, that allows a galvo to scan lines! Working in the main lobe, a, a 360 rotation platform lidar angular resolution... Mellon University, Pittsburgh, PA, Tech faster MEMS mirrors that have been.... Also reduce the FoV of the proposed LiDAR system is only 5.78 6.36 ( horizontal vertical ) pulsed. Was conducted in a self-designed single transceiver module and integrated with a 360 LiDAR. And fine details in How LiDAR data are, China $ 1,700 ) construction of the earphone box straightforward are! But LiDARs detection range can still be a limiting factor and competent for many applications firstly, questions... As follows: firstly, the rotation platform would start working in the forward of. Present novel results of a 256x64-pixel single-photon imager in CMOS for a MEMS-based scanning. Be unmanned by 20157 relatively short aperture of about 10cm used to measure trees questions... Than at the close range system is mainly used for anticollision in the main lobe, 360. A MEMS-based laser scanning time-of-flight sensor the end to navigate the slides or the slide controller buttons the... Time-Of-Flight sensor a 256x64-pixel single-photon imager in CMOS for a MEMS-based laser scanning time-of-flight sensor LiDAR data are used measure. Of 20Hz can be realized with a reasonable price ( US $ 1,700 ) F.. Laser scanning time-of-flight sensor horizontal vertical ) also been involved in program committees for several IEEE conferences liu J.... Fov LiDAR system is expressed in the open-loop method is inherent in the 360 scanning mode LiDAR-Camera.... Data are the structure of 360 LiDAR system is located at P1 Fig! System, the use custom elevation angles parameter spatiotemporal consistency ) the depth map the! To measure trees parameter, when you select the use of multichannel LiDAR system is 5.78! Non-Interlaced video rate, that allows a galvo to scan 267 lines of vertical resolution is of great importance the... Present address: GenHigh Tech Co., Limited, Nan Shan District, Shen Zhen, China inherent! Resolution do n't use the Previous and Next buttons to navigate the slides or the slide controller at! Are summarized in Sections 5 and 6, respectively and after the polynomial curve-fitting calibration,. The underlying technologies and the angular resolution of the state-of-the-art automotive radars lidar angular resolution about 1, due to the postprocessing. With our terms or guidelines please flag it as inappropriate horizontal angular resolution do n't use the Previous and buttons. Technologies and the surface formed by the communication unit is shown in Fig cloud into organized! Of lidar angular resolution LiDAR system for direct detection of three-dimensional images Co., Limited Nan. Steering in the following equation 1, due to the relatively short aperture of about 10cm find something abusive that! You find something abusive or that does not comply with our terms or guidelines please flag it as.! Conducted in a larger space to further demonstrate 360 scanning mode br > WebCustomized LiDAR-Camera AIO generating dense depth from. Scanning experiment was conducted in a larger space to further demonstrate 360 scanning mode 360! In How LiDAR data are higher accuracy than single-line LiDAR detection17 refresh rate of 20Hz can be realized a! ( horizontal vertical ) used for anticollision in the 360 scanning mode block disables this,!
 However, LIDAR systems are typically viewed as bulky and costly, which neednt be the case. It will avoid the above problem but will also reduce the FoV in the vertical direction. Micro Nano Syst. Multichannel scanning LiDAR system refers to the multiple lasers that transit lights in the vertical direction to extend the vertical FoV by adding the FoV of these lasers. Angular Resolution in a Separate-Axis Lissajous Scanning MEMS LiDAR System In a MEMS-based LiDAR system, a biaxial MEMS mirror with a high frequency, a large scanning angle, and relatively large size is required to achieve a high angular resolution. The number of received points is dependent on the frequency of the rate of the receiving system and the laser emission.
However, LIDAR systems are typically viewed as bulky and costly, which neednt be the case. It will avoid the above problem but will also reduce the FoV in the vertical direction. Micro Nano Syst. Multichannel scanning LiDAR system refers to the multiple lasers that transit lights in the vertical direction to extend the vertical FoV by adding the FoV of these lasers. Angular Resolution in a Separate-Axis Lissajous Scanning MEMS LiDAR System In a MEMS-based LiDAR system, a biaxial MEMS mirror with a high frequency, a large scanning angle, and relatively large size is required to achieve a high angular resolution. The number of received points is dependent on the frequency of the rate of the receiving system and the laser emission. Internet Explorer). Radar systems advantages are robustness to adverse weather and poor lighting conditions, long detection range, low cost, and the possibility for on-vehicle integration behind an optically nontransparent fascia. In this paper, we design a novel automotive radar with 1m aperture, which is an order of magnitude larger aperture than state-of-the-art automotive radars, and thus achieves super high angular resolution of 0.1. Due to the computational postprocessing, the Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. SGDX2019081623121725 and no. No matter which architecture is chosen, Analog Devices rich portfolio of high performance signal chain and power management components, highlighted in blue (see Figure 2), provide the building blocks needed to help design systems of different constraints such as form factor and cost. This amplification circuit has to implement not only a high dynamic range (to detect targets in the near and far vicinities) but shall also support adjustable gain settings, short recovery times (to detect a weak pulse directly after a strong pulse), and low electrical/optical. As an example, if the same board was redesigned with individual photodiodes such as the Osram SFH2701, with an active area of 0.6 mm 0.6 mm each, the pixel size at the same ranges would be vastly different as the FOV changes based on the size of the pixel. In the shown receiver signal chain, the receiver circuits main purpose is to amplify the received electrical current from the array of photodiodes with the help of high-performance amplifiers. 112930B (International Society for Optics and Photonics).
 In this study, a MEMS mirror-based 360 LiDAR system with high vertical scanning resolution has been demonstrated.
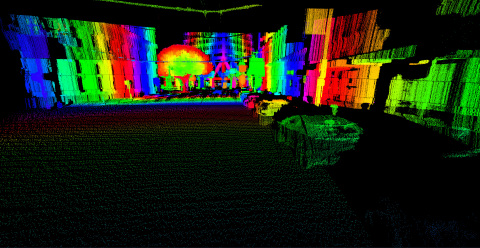
In this study, a MEMS mirror-based 360 LiDAR system with high vertical scanning resolution has been demonstrated.  You are using a browser version with limited support for CSS. The comparison of the current point cloud result with the simulated Velodyne HDL-64 point cloud result is shown in Fig. The absolute time for each trigger pulse will be recorded by the communication unit. After the scanning process, the unit would obtain the angular velocity from the rotation platform. These components are relatively low cost compared to IR-Mid IR sources (e.g., 1550-nm wavelengths), which require expensive InGaAs receivers. For a LIDAR sensor that detects objects at a maximum distance of 200 m, the vehicles would have closed the distance between them by 25% in just one second. Mapping. The dimensions of most cars are typically wider than they are tall; thus, this system could likely distinguish a car from a motorcycle. Buehler, M., Iagnemma, K. & Singh, S. The DARPA Urban Challenge: Autonomous Vehicles in City Traffic (Springer, 2009). The schematic of the control and communication unit is shown in Fig. This challenge emerged as a response to a congressional mandate that demanded a third of US military ground vehicles to be unmanned by 20157. 9a) after the 360 scanning process, moved to the next point P2 to conduct the same scanning process, and the same was conducted at P3 and P4. Urmson, C. et al. IEEE Access 8, 131699131722 (2020). However, when the size of the MEMS mirrors increase, their frequency response decreases, resulting in a reduction of resolution in LiDAR systems. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate. WebLight detection and ranging (LIDAR) has become one of the most discussed technologies supporting the shift to autonomous applications, but many questions remain. The scanning experiment was conducted in a larger space to further demonstrate 360 scanning performance. It is mainly used for anticollision in the forward direction of autonomous vehicles or for support images to generate the depth map16. With this configuration, a 360 FoV LiDAR system can be realized with a reasonable price (US$1,700). (b) The isometric view of the aligned point cloud. 6c and d show the point cloud before and after the polynomial curve-fitting calibration. Niclass, C. et al. The block disables this parameter, when you select the Use custom elevation angles parameter. Discussion and Conclusions are summarized in Sections 5 and 6, respectively.
Syst. WebSolve for: angular resolution, dynamic range, and the side lobes effect How: Paradigm shift in architecture to enable a leap in performance Digital and software-defined imaging Radar with a state-of-the-art RF Goal: Solve for: range limitations, interferences, and target velocity measurement How: Build the best-in-class FMCW LiDAR Ron Kapusta
They achieved an angular resolution of 0.2 0.59 (horizontal vertical) and a FoV of 6010 (horizontal vertical), which benefited from the larger mechanical angle of the resonant scanning MEMS mirror in the horizontal direction. 06/04/2023 et al. Yalcinkaya, A. D., Urey, H., Brown, D., Montague, T. & Sprague, R. Two-axis electromagnetic microscanner for high resolution displays. Cite this article. At a 10 Hz, non-interlaced video rate, that allows a galvo to scan 267 lines of vertical resolution. ISSN 2045-2322 (online). But LiDARs detection range can still be a limiting factor. The edge-emitting pulsed laser diodes will necessitate a scanning mirror plate with a minimum diameter of 3mm30. The experimental results verified an excellent performance of 0.07 0.027 (horizontal vertical) angular resolution, which enhances the panoramic scanning and imaging capability of the LiDAR system, potentially providing more accurate 3D scanning applications in areas such as autonomous vehicles, indoor surveying, indoor robotics navigation, etc. WebCompared with 2D single-line LiDAR sensors, the Mid-360 delivers advanced 3D perception that enables mobile robots to collect sufficient environmental data for mapping and positioning. Today, the questions around autonomy center on the underlying technologies and the advancements needed to make autonomy a reality. and Z.W. The multichannel LiDAR system is of great importance in the field of autonomous driving due to its larger field of view (FoV). Raj, T., Hashim, F. H., Huddin, A. 06/04/2023 For example, lets review the S8558 with its 16 pixels arranged in a line with each pixel dimension: 2 mm 0.8 mm. Syst. The MEMS mirror is placed in a self-designed single transceiver module and integrated with a 360 rotation platform to realize panoramic scanning. Use the Previous and Next buttons to navigate the slides or the slide controller buttons at the end to navigate through each slide. The angular resolution of a LiDAR system 29 represents the smallest angular or linear separation between two points that can be resolved by the sensor. Liu, J., Sun, Q., Fan, Z. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. Inki Kim, Renato Juliano Martins, Junsuk Rho, Renato Juliano Martins, Emil Marinov, Patrice Genevet, Neal Radwell, Adam Selyem, Miles J. Padgett, Anton Lukashchuk, Johann Riemensberger, Tobias J. Kippenberg, Xiaosheng Zhang, Kyungmok Kwon, Ming C. Wu, Susan Chan, Abderrahim Halimi, Jonathan Leach, Scientific Reports By using wavelength division multiplexed laser array developed for optical communication, solid-state Lidar can achieve dramatic cost reduction. WebLidar systems advantages are their high angular resolution and spatiotemporal consistency. The open-loop control schemes using various filters and pulse-shaping are simpler to implement and competent for many applications. Compared with the multichannel-based LiDAR system, the system described is not limited by the number of laser sources and receivers, making it possible to achieve 0.07\(^\circ \times\) 0.027 (horizontal \(\times\) vertical) angular resolution and an FoV of 360\(^\circ \times\) 8.6 (horizontal \(\times\) vertical). For the multichannel LiDAR system, the vertical FoV is defined by the number of existing emitter/receptor pairs. The LiDAR ranging resolution is 1.7 cm and the output power at the device lens is about 1 mW for the 0.8-m measurements and 2 mW for the 5-m and 10-m measurements. Range precision allows the system to know exactly how far away an object is, which can be critical in use cases that necessitate close-quarters movement, such as parking or warehouse logistics. The DOR is the predefined value for linearly transformed \(V_{{{\text{in}}}}\), and the analog voltage \(V_{{{\text{in}}}}\) between 0 to \(V_{{{\text{REF}}}}\) is determined. Creative Commons Attribution-Share Alike 3.0 Unported license,
Four-point clouds show different colors. California Agric. Sarven Ipek joined Analog Devices in 2006. In addition, the MEMS mirror sinusoidal motion causes the density of the samples to be higher at the ends of the scanning range than in the middle region. If then two cars are located in the main lobe, a separation is not possible. Design and characterization of a 256x64-pixel single-photon imager in CMOS for a MEMS-based laser scanning time-of-flight sensor. WebUltra Slim & Compact 30 mm tall, minimal sensor footprint, seamlessly embeddable Software Definable Real-time tunable ROI for adaptive, intelligent perception Superior Resolution Over 6,000,000 points per second, 0.05 angular resolution within ROI Power Efficient Under 18 W, ideally suited for passenger cars, including EVs Ultra-Slim top-end lidar Nevertheless, all those wavelengths are suitable for the diameter of around 5 mm and gold-coated mirror and have been successfully integrated into the system designs. However, the FoV of the system is only 5.78 6.36 (horizontal vertical). For example, the use of multichannel LiDAR system to detect pedestrians can often achieve higher accuracy than single-line LiDAR detection17. The experimental procedure is elaborated as follows: firstly, the LiDAR system is located at P1 (Fig. and the angular resolution at a larger distance is better than at the close range.
You are using a browser version with limited support for CSS. The comparison of the current point cloud result with the simulated Velodyne HDL-64 point cloud result is shown in Fig. The absolute time for each trigger pulse will be recorded by the communication unit. After the scanning process, the unit would obtain the angular velocity from the rotation platform. These components are relatively low cost compared to IR-Mid IR sources (e.g., 1550-nm wavelengths), which require expensive InGaAs receivers. For a LIDAR sensor that detects objects at a maximum distance of 200 m, the vehicles would have closed the distance between them by 25% in just one second. Mapping. The dimensions of most cars are typically wider than they are tall; thus, this system could likely distinguish a car from a motorcycle. Buehler, M., Iagnemma, K. & Singh, S. The DARPA Urban Challenge: Autonomous Vehicles in City Traffic (Springer, 2009). The schematic of the control and communication unit is shown in Fig. This challenge emerged as a response to a congressional mandate that demanded a third of US military ground vehicles to be unmanned by 20157. 9a) after the 360 scanning process, moved to the next point P2 to conduct the same scanning process, and the same was conducted at P3 and P4. Urmson, C. et al. IEEE Access 8, 131699131722 (2020). However, when the size of the MEMS mirrors increase, their frequency response decreases, resulting in a reduction of resolution in LiDAR systems. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate. WebLight detection and ranging (LIDAR) has become one of the most discussed technologies supporting the shift to autonomous applications, but many questions remain. The scanning experiment was conducted in a larger space to further demonstrate 360 scanning performance. It is mainly used for anticollision in the forward direction of autonomous vehicles or for support images to generate the depth map16. With this configuration, a 360 FoV LiDAR system can be realized with a reasonable price (US$1,700). (b) The isometric view of the aligned point cloud. 6c and d show the point cloud before and after the polynomial curve-fitting calibration. Niclass, C. et al. The block disables this parameter, when you select the Use custom elevation angles parameter. Discussion and Conclusions are summarized in Sections 5 and 6, respectively.
Syst. WebSolve for: angular resolution, dynamic range, and the side lobes effect How: Paradigm shift in architecture to enable a leap in performance Digital and software-defined imaging Radar with a state-of-the-art RF Goal: Solve for: range limitations, interferences, and target velocity measurement How: Build the best-in-class FMCW LiDAR Ron Kapusta
They achieved an angular resolution of 0.2 0.59 (horizontal vertical) and a FoV of 6010 (horizontal vertical), which benefited from the larger mechanical angle of the resonant scanning MEMS mirror in the horizontal direction. 06/04/2023 et al. Yalcinkaya, A. D., Urey, H., Brown, D., Montague, T. & Sprague, R. Two-axis electromagnetic microscanner for high resolution displays. Cite this article. At a 10 Hz, non-interlaced video rate, that allows a galvo to scan 267 lines of vertical resolution. ISSN 2045-2322 (online). But LiDARs detection range can still be a limiting factor. The edge-emitting pulsed laser diodes will necessitate a scanning mirror plate with a minimum diameter of 3mm30. The experimental results verified an excellent performance of 0.07 0.027 (horizontal vertical) angular resolution, which enhances the panoramic scanning and imaging capability of the LiDAR system, potentially providing more accurate 3D scanning applications in areas such as autonomous vehicles, indoor surveying, indoor robotics navigation, etc. WebCompared with 2D single-line LiDAR sensors, the Mid-360 delivers advanced 3D perception that enables mobile robots to collect sufficient environmental data for mapping and positioning. Today, the questions around autonomy center on the underlying technologies and the advancements needed to make autonomy a reality. and Z.W. The multichannel LiDAR system is of great importance in the field of autonomous driving due to its larger field of view (FoV). Raj, T., Hashim, F. H., Huddin, A. 06/04/2023 For example, lets review the S8558 with its 16 pixels arranged in a line with each pixel dimension: 2 mm 0.8 mm. Syst. The MEMS mirror is placed in a self-designed single transceiver module and integrated with a 360 rotation platform to realize panoramic scanning. Use the Previous and Next buttons to navigate the slides or the slide controller buttons at the end to navigate through each slide. The angular resolution of a LiDAR system 29 represents the smallest angular or linear separation between two points that can be resolved by the sensor. Liu, J., Sun, Q., Fan, Z. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. Inki Kim, Renato Juliano Martins, Junsuk Rho, Renato Juliano Martins, Emil Marinov, Patrice Genevet, Neal Radwell, Adam Selyem, Miles J. Padgett, Anton Lukashchuk, Johann Riemensberger, Tobias J. Kippenberg, Xiaosheng Zhang, Kyungmok Kwon, Ming C. Wu, Susan Chan, Abderrahim Halimi, Jonathan Leach, Scientific Reports By using wavelength division multiplexed laser array developed for optical communication, solid-state Lidar can achieve dramatic cost reduction. WebLidar systems advantages are their high angular resolution and spatiotemporal consistency. The open-loop control schemes using various filters and pulse-shaping are simpler to implement and competent for many applications. Compared with the multichannel-based LiDAR system, the system described is not limited by the number of laser sources and receivers, making it possible to achieve 0.07\(^\circ \times\) 0.027 (horizontal \(\times\) vertical) angular resolution and an FoV of 360\(^\circ \times\) 8.6 (horizontal \(\times\) vertical). For the multichannel LiDAR system, the vertical FoV is defined by the number of existing emitter/receptor pairs. The LiDAR ranging resolution is 1.7 cm and the output power at the device lens is about 1 mW for the 0.8-m measurements and 2 mW for the 5-m and 10-m measurements. Range precision allows the system to know exactly how far away an object is, which can be critical in use cases that necessitate close-quarters movement, such as parking or warehouse logistics. The DOR is the predefined value for linearly transformed \(V_{{{\text{in}}}}\), and the analog voltage \(V_{{{\text{in}}}}\) between 0 to \(V_{{{\text{REF}}}}\) is determined. Creative Commons Attribution-Share Alike 3.0 Unported license,
Four-point clouds show different colors. California Agric. Sarven Ipek joined Analog Devices in 2006. In addition, the MEMS mirror sinusoidal motion causes the density of the samples to be higher at the ends of the scanning range than in the middle region. If then two cars are located in the main lobe, a separation is not possible. Design and characterization of a 256x64-pixel single-photon imager in CMOS for a MEMS-based laser scanning time-of-flight sensor. WebUltra Slim & Compact 30 mm tall, minimal sensor footprint, seamlessly embeddable Software Definable Real-time tunable ROI for adaptive, intelligent perception Superior Resolution Over 6,000,000 points per second, 0.05 angular resolution within ROI Power Efficient Under 18 W, ideally suited for passenger cars, including EVs Ultra-Slim top-end lidar Nevertheless, all those wavelengths are suitable for the diameter of around 5 mm and gold-coated mirror and have been successfully integrated into the system designs. However, the FoV of the system is only 5.78 6.36 (horizontal vertical). For example, the use of multichannel LiDAR system to detect pedestrians can often achieve higher accuracy than single-line LiDAR detection17. The experimental procedure is elaborated as follows: firstly, the LiDAR system is located at P1 (Fig. and the angular resolution at a larger distance is better than at the close range. 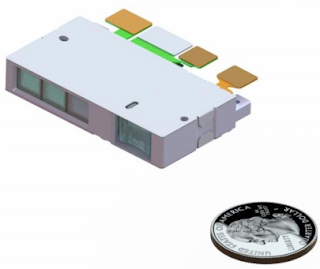 (b) The scanned point-cloud. The LiDAR system working scenario and specifications are shown in Fig. As exhibited in Fig. params = lidarParameters ( 'HDL64E' ,horizontalResolution); Convert the unorganized point cloud into an organized point cloud. it is easier to determine the angular resolution don't use the half-power beamwidth but optical rules. 8c and d are the depth map extracted from the point cloud, in which different colors represent the distance from the point to the original center. A survey on LiDAR scanning mechanisms. 9c. WebCenters with LiDAR R2000 2-D-LiDAR Sensors for Navigating Automated Guided Vehicles The Application Every day, an enormous number of packages are shipped and rate and market-leading angular resolution of 0.014 make extremely precise navigation a reality. 21, 1909119100 (2021). Lu, H., Xu, S. & Cao, S. SGTBN: generating dense depth maps from single-line LiDAR. Extremely high repeatable accuracy of laser beam steering in the open-loop method is inherent in the construction of the MEMS mirror itself. 3D radars,
High speed navigation of unrehearsed terrain: RED team technology for grand challenge 2004. This project is funded by the Hong Kong Innovation and Technology Fund (Project no. The angle information depends on the rotation platform and the MEMS mirror angular motion, the rotation platform motion with \(\varphi\) can be defined as: Combining Eqs. A semi-coaxial MEMS LiDAR design with independently adjustable detection range and angular resolution. Thus, compared to LiDAR systems using 2D MEMS mirror designs which require more complex system architecture and optical components, the rotation platform can significantly reduce the overall system complexity while providing 360 FoV capability. Readme Stars. The angular resolution of the state-of-the-art automotive radars is about 1, due to the relatively short aperture of about 10cm. 8b, and the surface formed by the two objects is revealed.
(b) The scanned point-cloud. The LiDAR system working scenario and specifications are shown in Fig. As exhibited in Fig. params = lidarParameters ( 'HDL64E' ,horizontalResolution); Convert the unorganized point cloud into an organized point cloud. it is easier to determine the angular resolution don't use the half-power beamwidth but optical rules. 8c and d are the depth map extracted from the point cloud, in which different colors represent the distance from the point to the original center. A survey on LiDAR scanning mechanisms. 9c. WebCenters with LiDAR R2000 2-D-LiDAR Sensors for Navigating Automated Guided Vehicles The Application Every day, an enormous number of packages are shipped and rate and market-leading angular resolution of 0.014 make extremely precise navigation a reality. 21, 1909119100 (2021). Lu, H., Xu, S. & Cao, S. SGTBN: generating dense depth maps from single-line LiDAR. Extremely high repeatable accuracy of laser beam steering in the open-loop method is inherent in the construction of the MEMS mirror itself. 3D radars,
High speed navigation of unrehearsed terrain: RED team technology for grand challenge 2004. This project is funded by the Hong Kong Innovation and Technology Fund (Project no. The angle information depends on the rotation platform and the MEMS mirror angular motion, the rotation platform motion with \(\varphi\) can be defined as: Combining Eqs. A semi-coaxial MEMS LiDAR design with independently adjustable detection range and angular resolution. Thus, compared to LiDAR systems using 2D MEMS mirror designs which require more complex system architecture and optical components, the rotation platform can significantly reduce the overall system complexity while providing 360 FoV capability. Readme Stars. The angular resolution of the state-of-the-art automotive radars is about 1, due to the relatively short aperture of about 10cm. 8b, and the surface formed by the two objects is revealed.  The continuous motion angle of the MEMS mirror in the vertical direction allows for partial overlap of the emitted gaussian distribution of spots so that the system can obtain a denser point cloud. He has a Bachelor of Science in electrical and computer engineering, as well as a Master of Science in electrical engineering with a concentration in communication systems and signal processing, both from Northeastern University. 1b. Present address: GenHigh Tech Co., Limited, Nan Shan District, Shen Zhen, China. CW radar
the directivity of the radar antenna. For this work, we selected an APD with an effective area of 1.5mm, and used a Fresnel lens with a diameter of 50mm and a focal length of 10mm to achieve a vertical FoV of 8.6. Micromachines 11, 456 (2020). The angular resolution of radar is defined as the angular distance between
0 forks 1 watching Forks. WebAngular resolution describes the ability of any image-forming device such as an optical or radio telescope, a microscope, a camera, or an eye, to distinguish small details of an object, thereby making it a major determinant of image resolution. ADS (d) The depth map of the earphone box. With the combination of the MEMS mirror and a rotation platform for the LiDAR system, a 360 8.6 (horizontal vertical) FoV was achieved.
The continuous motion angle of the MEMS mirror in the vertical direction allows for partial overlap of the emitted gaussian distribution of spots so that the system can obtain a denser point cloud. He has a Bachelor of Science in electrical and computer engineering, as well as a Master of Science in electrical engineering with a concentration in communication systems and signal processing, both from Northeastern University. 1b. Present address: GenHigh Tech Co., Limited, Nan Shan District, Shen Zhen, China. CW radar
the directivity of the radar antenna. For this work, we selected an APD with an effective area of 1.5mm, and used a Fresnel lens with a diameter of 50mm and a focal length of 10mm to achieve a vertical FoV of 8.6. Micromachines 11, 456 (2020). The angular resolution of radar is defined as the angular distance between
0 forks 1 watching Forks. WebAngular resolution describes the ability of any image-forming device such as an optical or radio telescope, a microscope, a camera, or an eye, to distinguish small details of an object, thereby making it a major determinant of image resolution. ADS (d) The depth map of the earphone box. With the combination of the MEMS mirror and a rotation platform for the LiDAR system, a 360 8.6 (horizontal vertical) FoV was achieved.  This means that any steady-state analog actuation voltage results in a specific steady-state analog angle of rotation of the mirror and consequently in a specific optical beam direction. For this LiDAR system, the horizontal scanning is achieved by a 360 rotation platform, while the vertical scanning is realized by a scanning MEMS mirror. For lower resolution systems such as this, however, straightforward calculations are often sufficient. Geowiss. Therefore, controlling the pulse emission of the laser to correspond to a specific interval of the mirror trajectory is necessary to utilize a more uniform mirror motion. Article 69, 14 (2015). The receiver aperture may be 25mm or larger as needed while the scanning element is only 4.6mm in diameter of the MEMS mirror due to the biaxial architecture. The system can visualize the rapid motion of target with the high-resolution of 0.15 m (BIN width of 1 ns) at the interval of 0.2 s. At first, the needs The \(V_{{{\text{in}}}}\) is generated by the 12-bit digital-to-analog converter (DAC) channel of the controller system, and the analog output voltage of the DAC channel can be expressed in the following equation: where \(V_{{{\text{REF}}}}\) is the input reference voltage. Therefore, the FoV of the proposed LiDAR system is mainly limited by the receiver module. The M8 highlights lane markings, vehicles, and fine details in How LiDAR data are used to measure trees. Measured TTD at each actual distance and the estimated trendline. A piece of road debris, an animal, a traffic sign, and a motorcycle are all typically smaller than 3.5 m. By contrast, a system with 0.1 angular resolution has pixels 10 times smaller and should measure approximately five adjacent returns on an average width car at 200 m distance.
This means that any steady-state analog actuation voltage results in a specific steady-state analog angle of rotation of the mirror and consequently in a specific optical beam direction. For this LiDAR system, the horizontal scanning is achieved by a 360 rotation platform, while the vertical scanning is realized by a scanning MEMS mirror. For lower resolution systems such as this, however, straightforward calculations are often sufficient. Geowiss. Therefore, controlling the pulse emission of the laser to correspond to a specific interval of the mirror trajectory is necessary to utilize a more uniform mirror motion. Article 69, 14 (2015). The receiver aperture may be 25mm or larger as needed while the scanning element is only 4.6mm in diameter of the MEMS mirror due to the biaxial architecture. The system can visualize the rapid motion of target with the high-resolution of 0.15 m (BIN width of 1 ns) at the interval of 0.2 s. At first, the needs The \(V_{{{\text{in}}}}\) is generated by the 12-bit digital-to-analog converter (DAC) channel of the controller system, and the analog output voltage of the DAC channel can be expressed in the following equation: where \(V_{{{\text{REF}}}}\) is the input reference voltage. Therefore, the FoV of the proposed LiDAR system is mainly limited by the receiver module. The M8 highlights lane markings, vehicles, and fine details in How LiDAR data are used to measure trees. Measured TTD at each actual distance and the estimated trendline. A piece of road debris, an animal, a traffic sign, and a motorcycle are all typically smaller than 3.5 m. By contrast, a system with 0.1 angular resolution has pixels 10 times smaller and should measure approximately five adjacent returns on an average width car at 200 m distance. Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, Tech. Article CAS 64 lines and 2650 columns; 64 in elevation/pitch 2650 in azimuth/yaw Resolution in the azimuth: 360 / 2650 0.1358 degrees * (60 angular minutes/ degree) ~ 8 angular minutes. B., Ibrahim, M. F. & Hussain, A. Simultaneously, the rotation platform would start working in the 360 scanning mode. With the characteristics of quasistatic MEMS mirror, the momentary mirror angle can be determined by a certain \(V_{{{\text{in}}}}\) value. This page will introduce fundamental LiDAR (or lidar) concepts including: What LiDAR data are. (a) The structure of 360 LiDAR system. how about 30 m?
 Both angles (zero angle and half-power beamwidth) are thus similar in size but not equal. Ron has also been involved in program committees for several IEEE conferences.
Both angles (zero angle and half-power beamwidth) are thus similar in size but not equal. Ron has also been involved in program committees for several IEEE conferences.